// Kamera
camera {
sky <0,0,1> // Vektor, der festlegt, wo oben ist.
right <-4/3,0,0> // Bildverhältnis 4:3, plus Spiegelung für rechtsdrehendes System
location <20,8,18> // Position der Kamera
look_at <0, 0, 1> // Blickrichtung (erscheint im Bildmittelpunkt)
angle 30 // Öffnungswinkel der Kamera
}
// Lichtquellen
light_source {
<12,-2,12> // Position des Lichts
color rgb <1,1,1> // Farbe des Lichts, als rot-grün-blau Vektor (Komponenten 0 bis 1)
}
light_source {
<13,10,13> // Position des Lichts
color rgb <1,1,1> // Farbe des Lichts, als rot-grün-blau Vektor (Komponenten 0 bis 1)
}
// Boden (xy-Ebene, kariert mit Quadraten von Seitenlänge 1)
plane {
z,0 // Ebene, senkrecht zu z=<0,0,1>, mit Abstand 0 zum Ursprung
pigment { // Schachbrett
checker color rgb <1,1,1>, color rgb <0.2,0.2,0.2>
}
finish { reflection 0.4 }
} // Ende Boden
#declare zeit=clock*5/16; // 5 Sekunden simulieren (1 Umdrehung)
#declare wagen=16; // Anzahl Wagen
#declare h1=2; // Höhe über Boden des Drehzentrums.
#declare a1=15/360.0*2*pi; // Neigungswinkel (in Radianten)
#declare w2=12.0/60.0*2*pi; // Drehgeschwindigkeit der Scheibe in rad/s
#declare a2=w2*zeit; // Momentaner Drehwinkel
#declare a3=5.0/360*2*pi; // Elongation der Pendelbewegung
#declare r3=5; // Distanz Drehzentrum - Passagier
#declare wagennr=0;
#while (wagennr<wagen)
#declare a2 = a2 + 1/wagen*2*pi;
#declare f3=-a3*cos(3*a2); // Pendelwinkel
// K1 (Ebene der Drehscheibe)
#declare x1=-sin(a1)*z+cos(a1)*x;
#declare y1=y;
#declare z1=cos(a1)*z+sin(a1)*x;
#declare o1=h1*z;
// K2 (Drehende Ebene)
#declare x2=cos(a2)*x1+sin(a2)*y1;
#declare y2=-sin(a2)*x1+cos(a2)*y1;
#declare z2=z1;
#declare o2=o1;
// K3 (mit Pendelbewegung)
#declare x3=cos(f3)*x2+sin(f3)*z2;
#declare y3=y2;
#declare z3=-sin(f3)*x2+cos(f3)*z2;
#declare o3=o2;
#declare p=o3+r3*x3; // Position des Passagiers
sphere {p, 0.3
pigment { color rgb x }
}
cylinder { o3,p,0.1
pigment { color rgb x2 }
}
cylinder { p,p-10*z, 0.03
pigment { color rgb z }
}
#declare wagennr=wagennr+1;
#end // while
Maxima Code (für die Ableitungen)
/* K0 */
o0:[0,0,0];
x0:[1,0,0];
y0:[0,1,0];
z0:[0,0,1];
alpha1:15/180*%pi;
h1:2;
/* K1 schiefe Ebene */
o1:o0+h1*z0;
x1:-sin(alpha1)*z0+cos(alpha1)*x0;
y1:y0;
z1:cos(alpha1)*z0+sin(alpha1)*x0;
/* Parameter K2 */
omega2:12/60*2*%pi;
alpha2:omega2*t;
/* K2, drehende Ebene */
o2:o1;
x2:cos(alpha2)*x1+sin(alpha2)*y1;
y2:-sin(alpha2)*x1+cos(alpha2)*y1;
z2:z1;
/* Parameter K3 */
r3:5;
alpha3:5/360*2*%pi;
f3:-alpha3*cos(3*alpha2);
o3:o2;
x3:cos(f3)*x2+sin(f3)*z2;
y3:y2;
z3:-sin(f3)*x2+cos(f3)*z2;
/* Passagier */
define(p(t), o3+r3*x3);
define(v(t), diff(p(t),t));
define(a(t), diff(v(t),t)-9.81*z0);
/* Betraege der Geschwindigkeit und Beschleunigung */
define(aa(t), sqrt(a(t).a(t)));
define(vv(t), sqrt(v(t).v(t)));
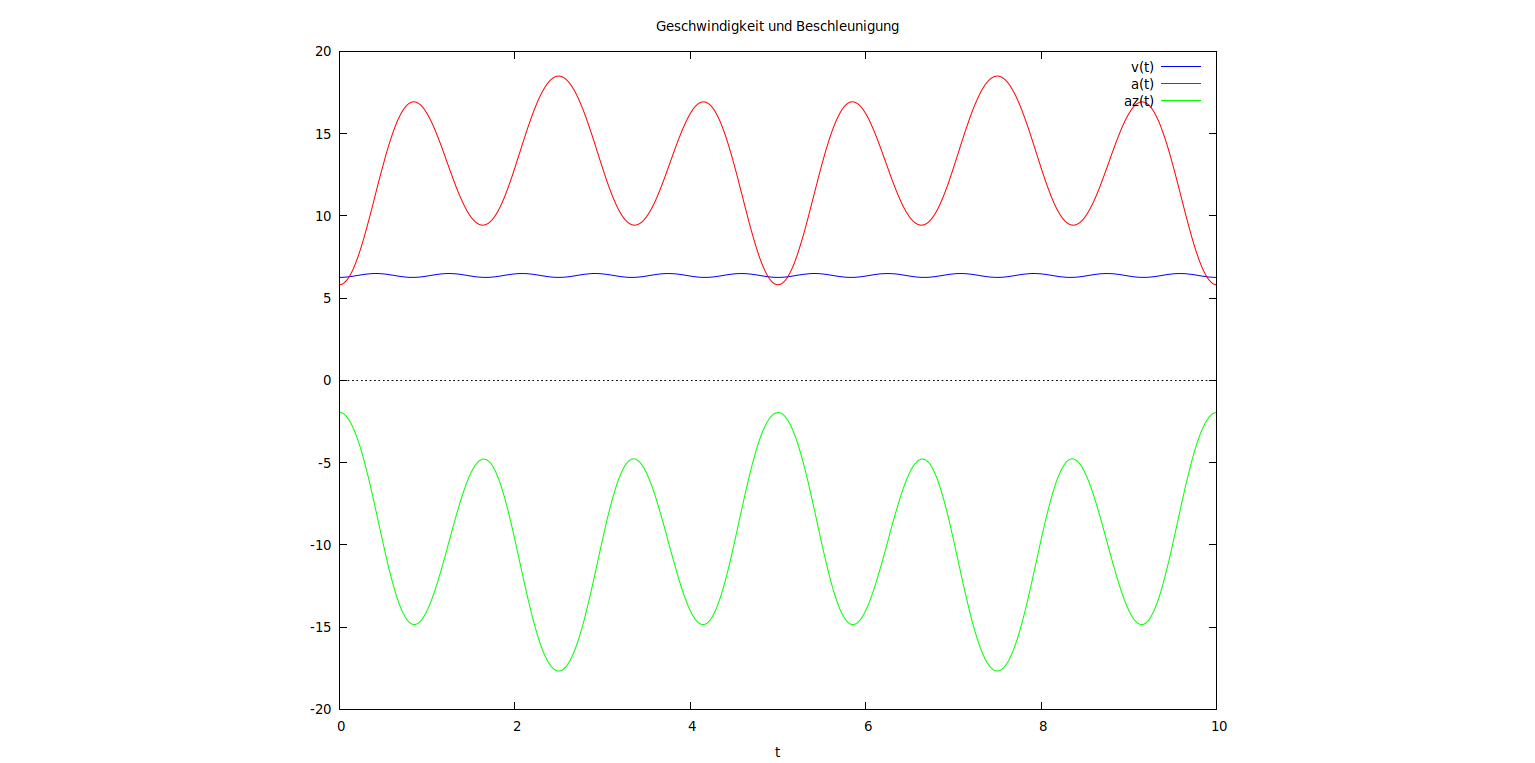
plot2d([vv(t),aa(t), a(t).[0,0,1]], [t, 0,10],
[title, "Geschwindigkeit und Beschleunigung"],
[legend, "v(t)", "a(t)", "az(t)"]);
Das Bild dazu:
 $$\left[ 5\,\left(\cos \left({{\pi}\over{12}}\right)\,\cos \left({{2
\,\pi\,t}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t
}\over{5}}\right)}\over{36}}\right)-\sin \left({{\pi}\over{12}}
\right)\,\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right)\right) , 5\,\sin \left({{2\,\pi\,t}\over{5}}
\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right) , 5\,\left(-\cos \left({{\pi}\over{12}}\right)\,
\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)-\sin \left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi\,t
}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)\right)+2 \right] $$
Beschleunigung:
$$\left[ 5\,\left({{\pi^4\,\sin \left({{\pi}\over{12}}\right)\,\sin ^
2\left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{
6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{900}}-{{2\,\pi^3
\,\cos \left({{\pi}\over{12}}\right)\,\sin \left({{2\,\pi\,t}\over{5
}}\right)\,\sin \left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi
\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{75
}}+{{\pi^3\,\cos \left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi
\,t}\over{5}}\right)\,\cos \left({{6\,\pi\,t}\over{5}}\right)\,\sin
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{25}}-{{\pi^4\,\cos \left({{\pi}\over{12}}\right)\,
\cos \left({{2\,\pi\,t}\over{5}}\right)\,\sin ^2\left({{6\,\pi\,t
}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)}\over{900}}+{{\pi^3\,\sin \left({{\pi
}\over{12}}\right)\,\cos \left({{6\,\pi\,t}\over{5}}\right)\,\cos
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{25}}-{{4\,\pi^2\,\cos \left({{\pi}\over{12}}\right)\,
\cos \left({{2\,\pi\,t}\over{5}}\right)\,\cos \left({{\pi\,\cos
\left({{6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{25}}
\right) , {{2\,\pi^3\,\cos \left({{2\,\pi\,t}\over{5}}\right)\,\sin
\left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6
\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{15}}+{{\pi^3\,
\sin \left({{2\,\pi\,t}\over{5}}\right)\,\cos \left({{6\,\pi\,t
}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)}\over{5}}-{{\pi^4\,\sin \left({{2\,\pi\,
t}\over{5}}\right)\,\sin ^2\left({{6\,\pi\,t}\over{5}}\right)\,\cos
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{180}}-{{4\,\pi^2\,\sin \left({{2\,\pi\,t}\over{5}}
\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right)}\over{5}} , 5\,\left({{\pi^4\,\cos \left({{\pi
}\over{12}}\right)\,\sin ^2\left({{6\,\pi\,t}\over{5}}\right)\,\sin
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{900}}+{{2\,\pi^3\,\sin \left({{\pi}\over{12}}\right)\,
\sin \left({{2\,\pi\,t}\over{5}}\right)\,\sin \left({{6\,\pi\,t
}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)}\over{75}}-{{\pi^3\,\sin \left({{\pi
}\over{12}}\right)\,\cos \left({{2\,\pi\,t}\over{5}}\right)\,\cos
\left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6
\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{25}}+{{\pi^4\,
\sin \left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi\,t}\over{5}}
\right)\,\sin ^2\left({{6\,\pi\,t}\over{5}}\right)\,\cos \left({{\pi
\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{
900}}+{{\pi^3\,\cos \left({{\pi}\over{12}}\right)\,\cos \left({{6\,
\pi\,t}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t
}\over{5}}\right)}\over{36}}\right)}\over{25}}+{{4\,\pi^2\,\sin
\left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi\,t}\over{5}}
\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right)}\over{25}}\right)-9.81 \right] $$
$$\left[ 5\,\left(\cos \left({{\pi}\over{12}}\right)\,\cos \left({{2
\,\pi\,t}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t
}\over{5}}\right)}\over{36}}\right)-\sin \left({{\pi}\over{12}}
\right)\,\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right)\right) , 5\,\sin \left({{2\,\pi\,t}\over{5}}
\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right) , 5\,\left(-\cos \left({{\pi}\over{12}}\right)\,
\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)-\sin \left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi\,t
}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)\right)+2 \right] $$
Beschleunigung:
$$\left[ 5\,\left({{\pi^4\,\sin \left({{\pi}\over{12}}\right)\,\sin ^
2\left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{
6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{900}}-{{2\,\pi^3
\,\cos \left({{\pi}\over{12}}\right)\,\sin \left({{2\,\pi\,t}\over{5
}}\right)\,\sin \left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi
\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{75
}}+{{\pi^3\,\cos \left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi
\,t}\over{5}}\right)\,\cos \left({{6\,\pi\,t}\over{5}}\right)\,\sin
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{25}}-{{\pi^4\,\cos \left({{\pi}\over{12}}\right)\,
\cos \left({{2\,\pi\,t}\over{5}}\right)\,\sin ^2\left({{6\,\pi\,t
}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)}\over{900}}+{{\pi^3\,\sin \left({{\pi
}\over{12}}\right)\,\cos \left({{6\,\pi\,t}\over{5}}\right)\,\cos
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{25}}-{{4\,\pi^2\,\cos \left({{\pi}\over{12}}\right)\,
\cos \left({{2\,\pi\,t}\over{5}}\right)\,\cos \left({{\pi\,\cos
\left({{6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{25}}
\right) , {{2\,\pi^3\,\cos \left({{2\,\pi\,t}\over{5}}\right)\,\sin
\left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6
\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{15}}+{{\pi^3\,
\sin \left({{2\,\pi\,t}\over{5}}\right)\,\cos \left({{6\,\pi\,t
}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)}\over{5}}-{{\pi^4\,\sin \left({{2\,\pi\,
t}\over{5}}\right)\,\sin ^2\left({{6\,\pi\,t}\over{5}}\right)\,\cos
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{180}}-{{4\,\pi^2\,\sin \left({{2\,\pi\,t}\over{5}}
\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right)}\over{5}} , 5\,\left({{\pi^4\,\cos \left({{\pi
}\over{12}}\right)\,\sin ^2\left({{6\,\pi\,t}\over{5}}\right)\,\sin
\left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}
\right)}\over{900}}+{{2\,\pi^3\,\sin \left({{\pi}\over{12}}\right)\,
\sin \left({{2\,\pi\,t}\over{5}}\right)\,\sin \left({{6\,\pi\,t
}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5
}}\right)}\over{36}}\right)}\over{75}}-{{\pi^3\,\sin \left({{\pi
}\over{12}}\right)\,\cos \left({{2\,\pi\,t}\over{5}}\right)\,\cos
\left({{6\,\pi\,t}\over{5}}\right)\,\sin \left({{\pi\,\cos \left({{6
\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{25}}+{{\pi^4\,
\sin \left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi\,t}\over{5}}
\right)\,\sin ^2\left({{6\,\pi\,t}\over{5}}\right)\,\cos \left({{\pi
\,\cos \left({{6\,\pi\,t}\over{5}}\right)}\over{36}}\right)}\over{
900}}+{{\pi^3\,\cos \left({{\pi}\over{12}}\right)\,\cos \left({{6\,
\pi\,t}\over{5}}\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t
}\over{5}}\right)}\over{36}}\right)}\over{25}}+{{4\,\pi^2\,\sin
\left({{\pi}\over{12}}\right)\,\cos \left({{2\,\pi\,t}\over{5}}
\right)\,\cos \left({{\pi\,\cos \left({{6\,\pi\,t}\over{5}}\right)
}\over{36}}\right)}\over{25}}\right)-9.81 \right] $$

