Spannungsversorgung und so
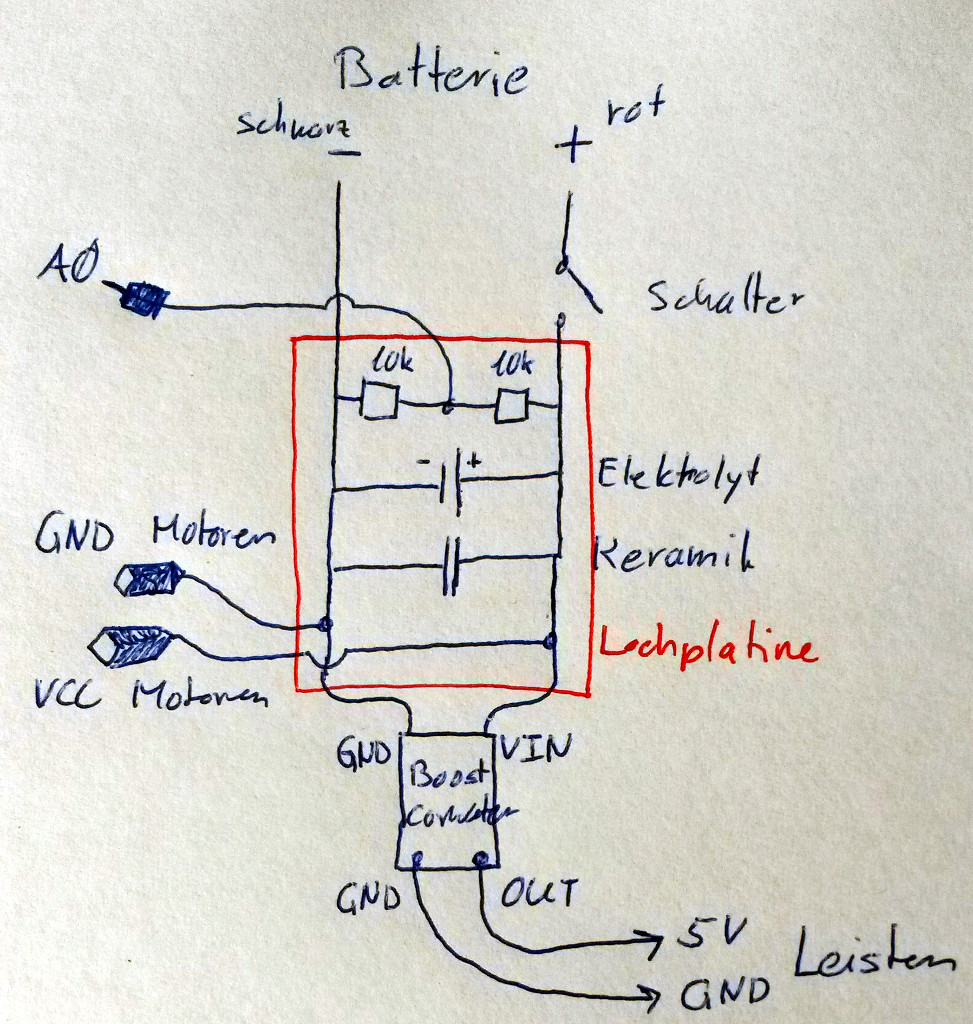
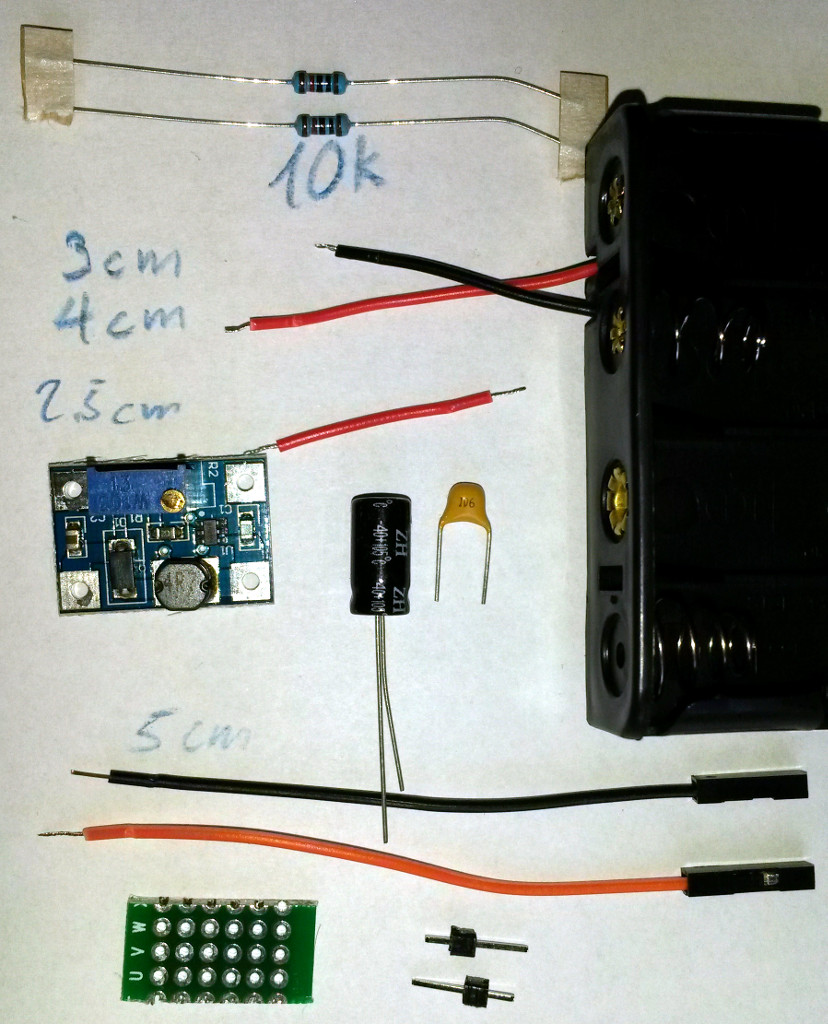
- Platine mit 3 Reihen
- 2 Widerstände 10 k$\Omega$
- 2 Kondensatoren 10 $\mu$F, 1 Keramik, 1 Elektrolyt (Achtung Polung!)
- 2 Dupont-Kabel (w-w) (rot/schwarz) 5cm abgeschnitten mit Weibchen-Anschluss (die grössere Hälfte für die Motoren aufbewahren!)
- 1 Dupont-Kabel 20cm Männchen-Weibchen (nicht auf Foto, SK: Farbe spezifieren?)
- Batteriefach, rot auf 4 cm, schwarz auf 3 cm geschnitten.
- 2.5cm roter Draht (Rest vom Batteriefach Draht).
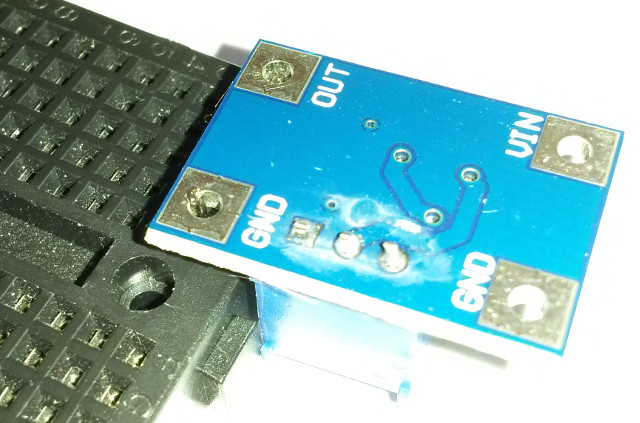
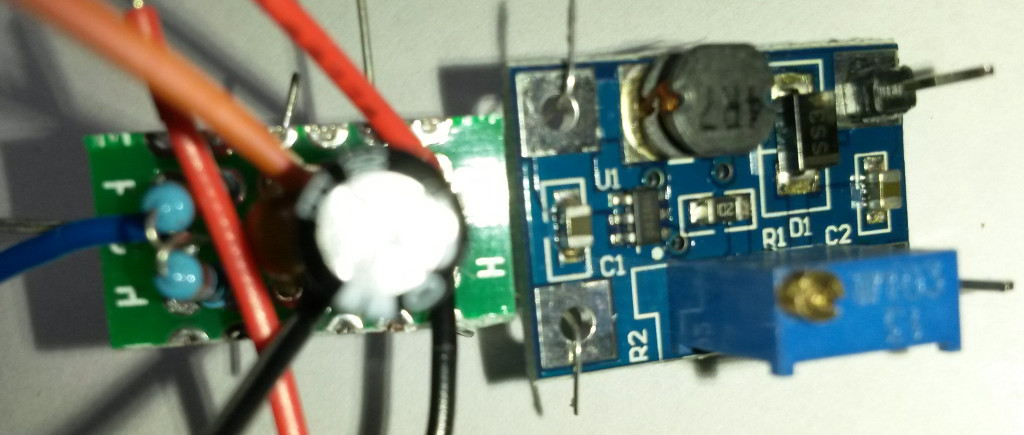
- Boost-Converter (blaue Platine mit Potentionmeter)
- 3 Stifte für Anschluss
Alle Drähte ca. 4mm abisolieren und dünn verzinnen (erst den Draht heizen, Lot auf den Draht, nicht auf die Lötspitze!):
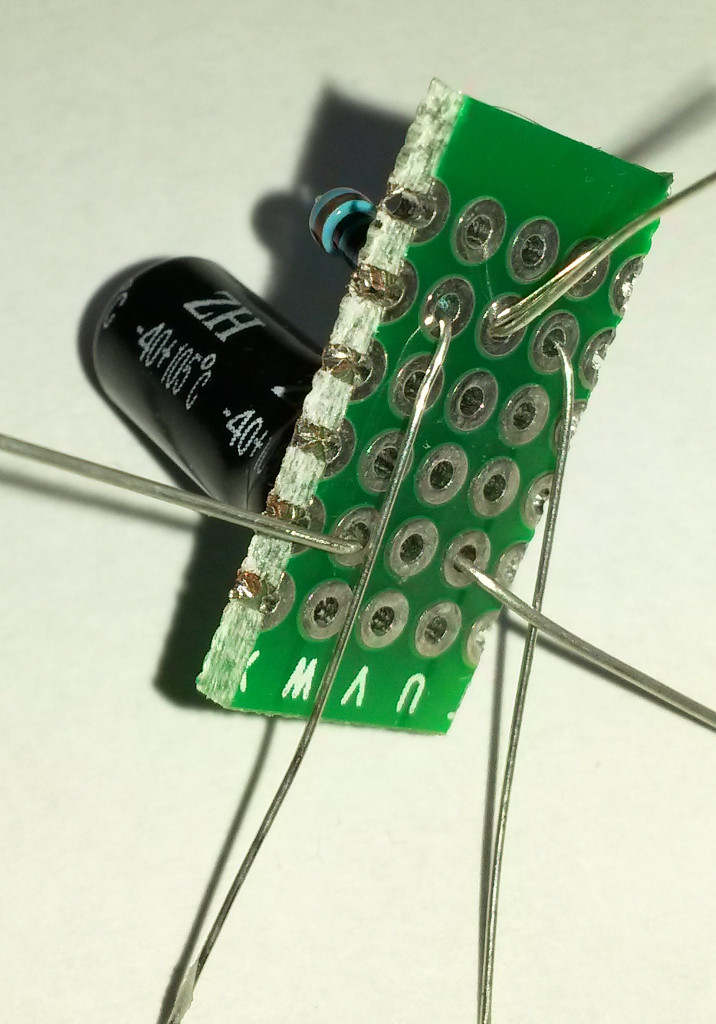
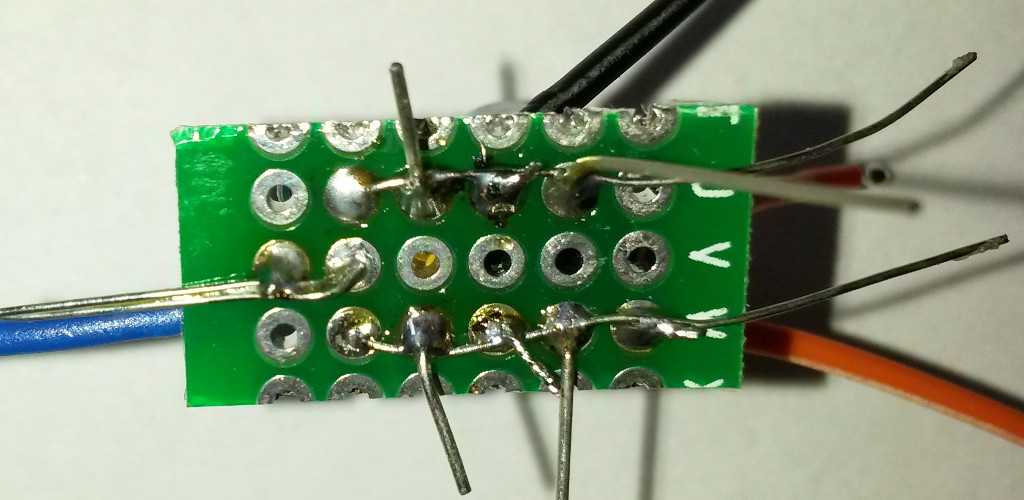
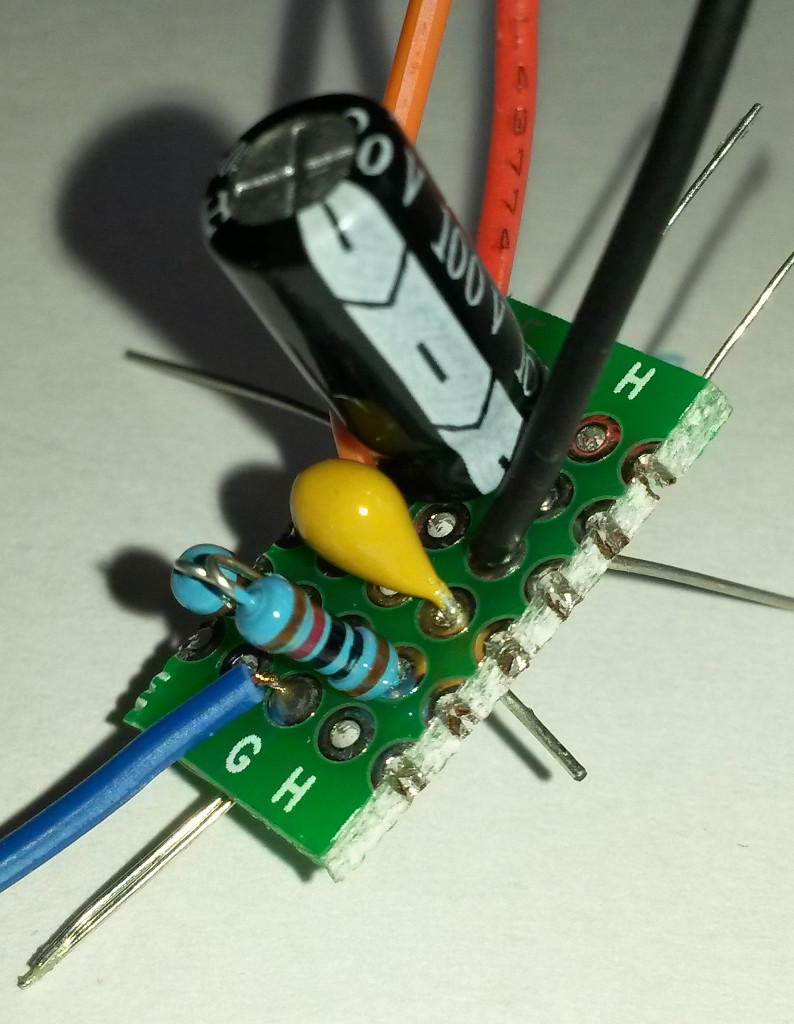
Widerstände und Elektrolytkondensator (Polung beachten!) wie abgebildet einsetzen.
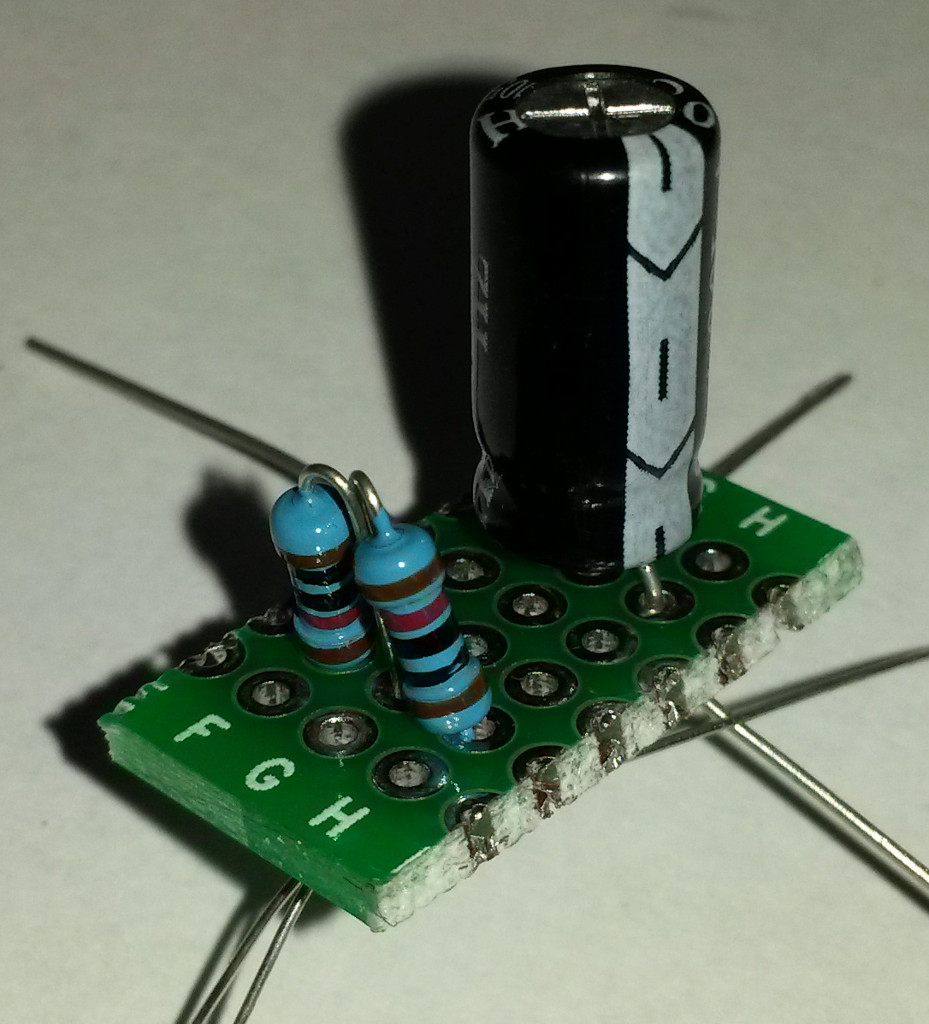
Die äusseren Beine der Widerstände längs über Alle Lötaugen biegen. Kondensatorbeine nach aussen biegen.
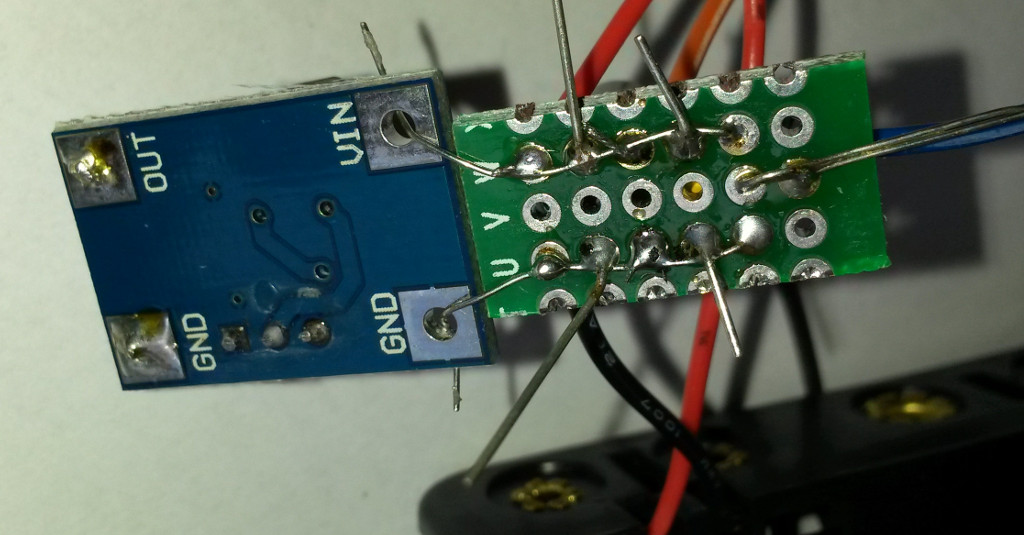
Anschluss-Stifte für Boost-Konverter in Steckbrett (schlechte Lötpraxis!)
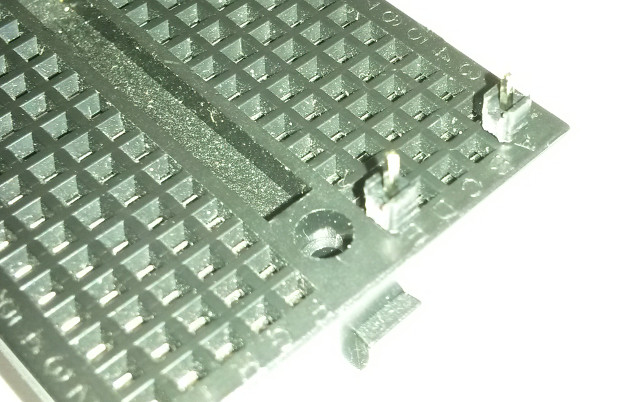
Stifte anlöten (bei GND/OUT!)
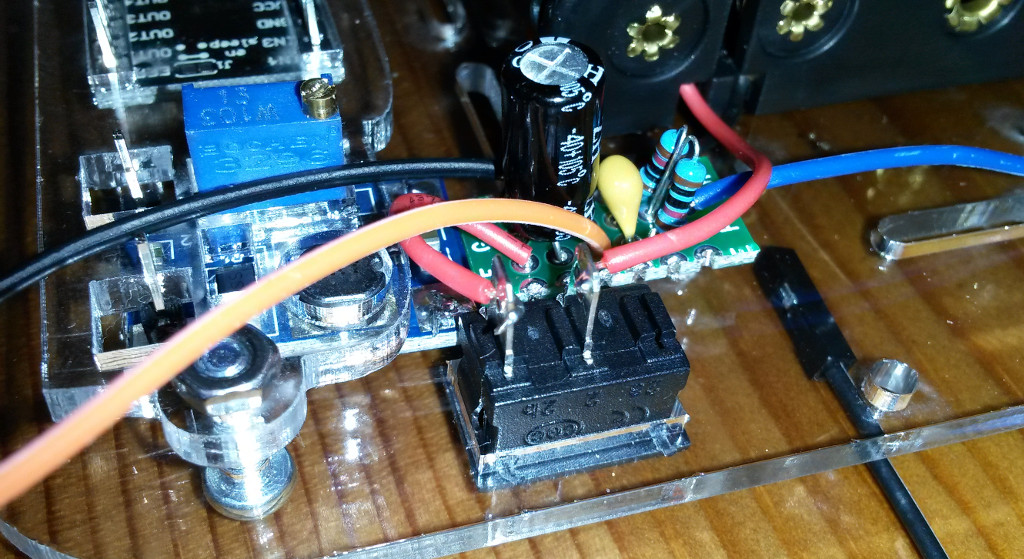
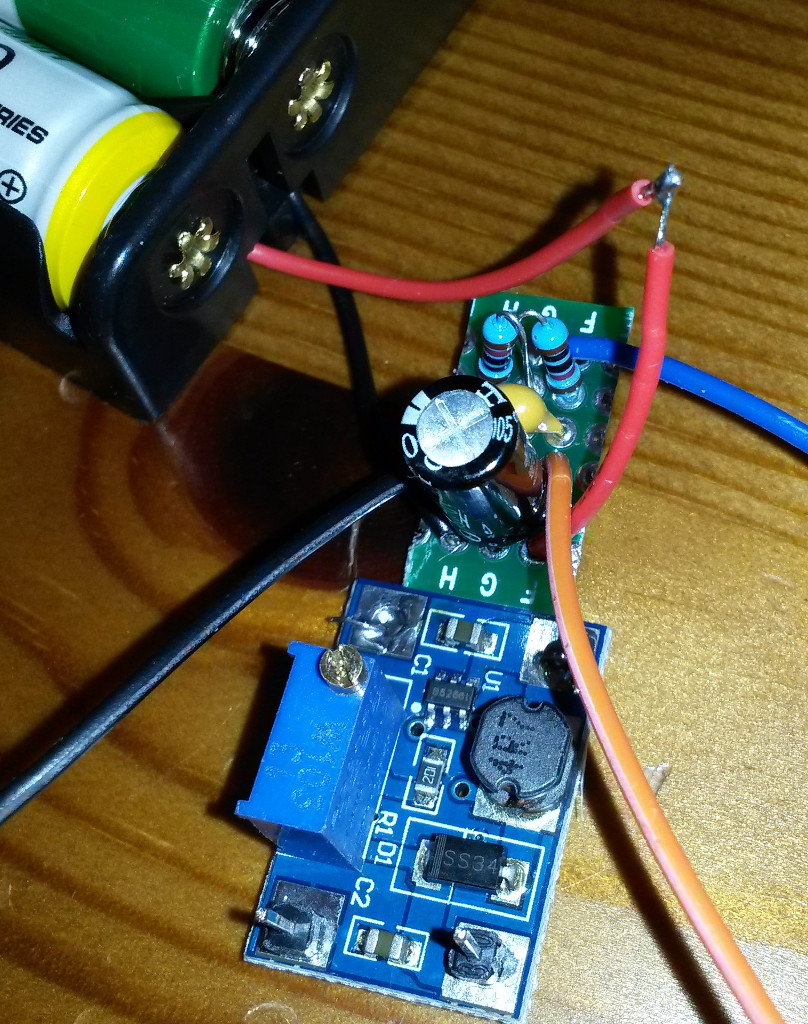
Rote Drähte (2.5cm ohne Anschluss, 5cm mit Weibchen-Stecker neben dem Kondensator (Plus-Seite!) einsetzen und Keramik-Kondensator wie im Bild platzieren. Auf der anderen Seite schwarzen Draht (5cm mit Weibchen-Anschluss) platzieren.
In der Mitte “hinten” Anschlussstift für Dupont-Kabel mit Männchen-Anschluss platzieren. (Nicht so im Bild).
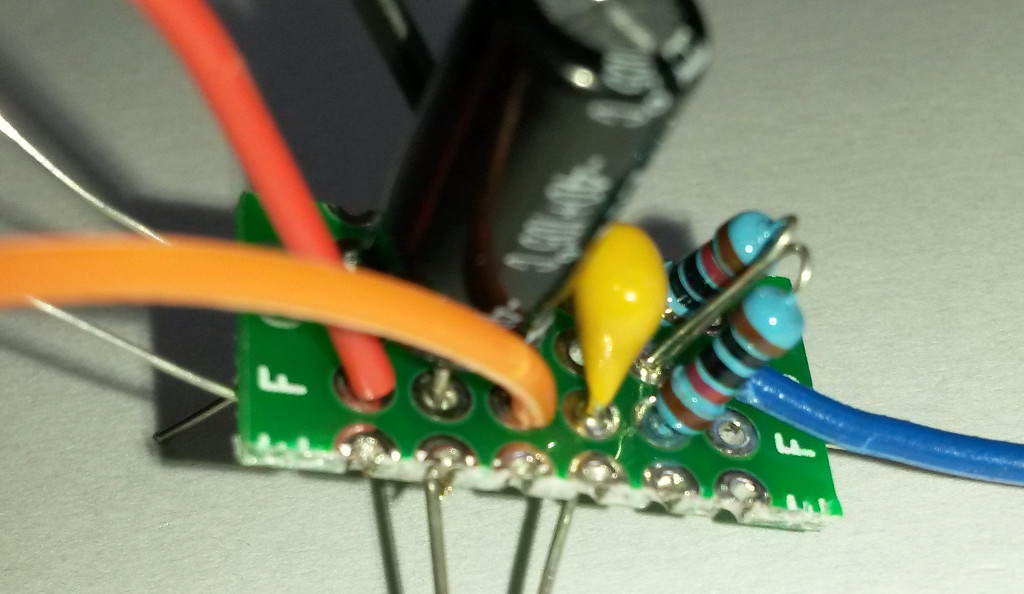
Bauteile anlöten, mit den Drähten der Widerstände (SK: rote Kabel mit einem Bein der äusseren Widerstände; schwarze Kabel mit anderem äusseren Bein der Widerstände; Dupont-Stift mit mittleren Beinen) verlöten. Achtung: Letztes Loch für Minus-Pol der Batterie (schwarzer Draht) frei lassen und danach anlöten.
Boost-Converter mit den Widerstandsdrähten wie in den Bildern verbinden und anlöten.
Eine Batterie mit einem m-m Dupont-Kabel überbrücken (Spannung muss unter 5 V liegen).

Die roten Drähte temporär zusammenlöten. Spannung am Ausgang (Stifte) überprüfen. Am Potentiometer so lange im Gegenuhrzeigersinn drehen, bis genau 5.05 V am Ausgang anliegt. Überprüfen mit Multimeter oder einem Arduino (am hier blauen Kabel muss 2.5V anliegen).
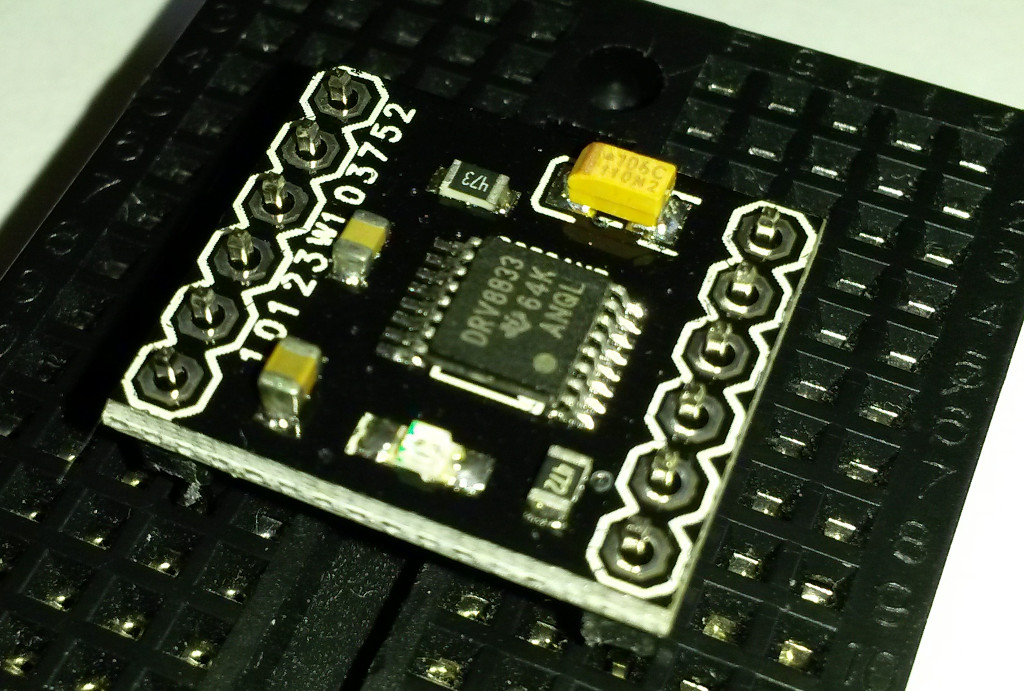
Motoren-Driver löten.
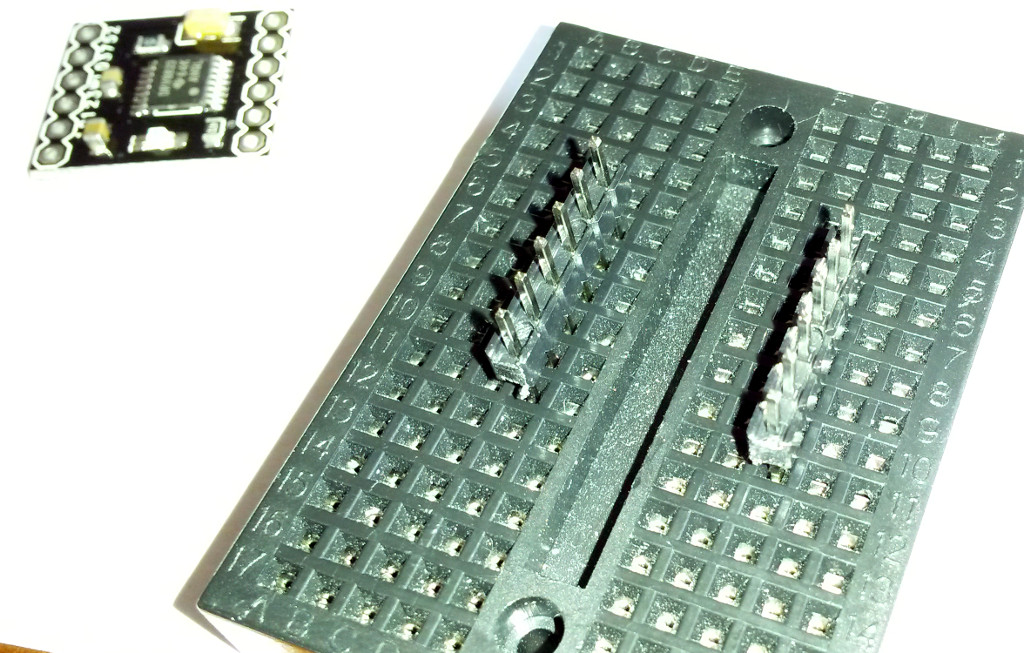
Pin-Beschriftungen nach unten:
Batteriefach mit Senkkopfschrauben auf Grundplatte fixieren.
Beide Platinen mit Befestigungsplatte nur leicht anschrauben, Kippschalter in Grundplatte fixieren (0 gegen aussen) und rote Drähte anlöten (erst drum herum wickeln, dann Lasche und Draht heizen, Lot darauf (nicht auf Lötspitze)).